多くの方法があみだされてきた測位方法
人工衛星からの信号により位置を測る測位方法には、精度や方式によって以下のようなさまざまな種類があります。
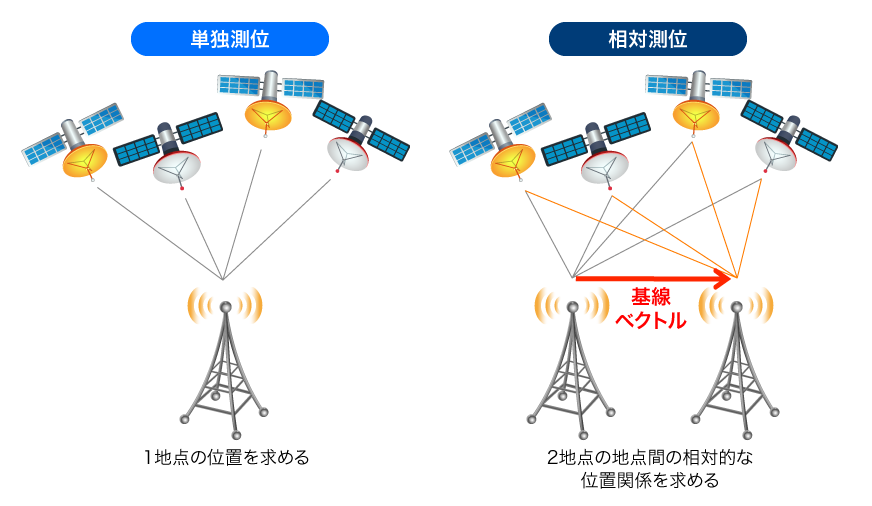
単独測位(誤差:10m〜20m)
1台の受信機によって測位を行う方法。精度としてはそれほど高くなく、誤差10〜20mが生まれます。
相対測位(誤差:1cm〜5m)
複数の受信機で4個以上のGPS衛星を同時に観測して受信機間の相対的な位置関係を計測する方法で、高精度。
D-GPS(ディファレンシャル測位)(誤差:50cm〜5m)
複数の受信機で単独測位を行ってそれぞれの位置情報から相対位置を求める方法
RTK測位(干渉測位)(誤差:1cm〜5cm)
複数の受信機と衛星との距離の差(行路差)を搬送波の位相により求め、受信機間の相対位置を決定する方法
①スタティック測位
静止測量。精度は良いが、時間がかかる
②キネマティック測位
移動観測。1分以上の観測が必要
③RTK−GNSS
基準局が必要だが、1秒データの10秒観測で、3〜4級基準点測量の精度の測定ができる
④ネットワーク型RTK−GNSS(VRS)
基準局の代わりに補正データ(仮想基準点)をデータ通信により提供
⑤ネットワーク型RTK−GNSS(FKP)
基準局の代わりに補正データ(面補正データ)をデータ通信により提供
それぞれの測位の特徴(従来の測位方式との比較)
従来の測位技術
| 測位技術 | 測位方式 | コスト | 基準局 | 測位技術概要 | 測位精度 |
|---|---|---|---|---|---|
| コードフェーズ | GPS 単独測位 |
◎ | 不要 | GPS衛星からの信号到達時間差を距離に換算し測位。 | 5~20m |
| DGPS | ◎ | 必要(国内のみ) | GPS衛星からの信号+補正情報を利用して測位。 | 1m以下 | |
| キャリアフェーズ | L1 GPS RTK | ○ | 必要(基線長に制約あり) | GPS衛星からの信号の搬送波をカウント。距離に換算し測位。 | 1~10cm程度 |
| L1マルチGNSS RTK | ○ | 必要(基線長にやや制約) | 複数の測位衛星システムからの信号の搬送波をカウント。距離に換算し測位。 | 1~10cm程度 | |
| 多周波GPS RTK | × | 必要補正データ大) | GPS衛星からの複数の周波数の信号の搬送波をカウント。距離に換算し測位。 | 1~10cm程度 | |
| 多周波マルチGNSS RTK | × | 必要(補正データ大) | 複数の測位衛星システムの複数の周波数の信号の搬送波をカウント。距離に換算し測位。 | 1~10cm程度 |
![]()
準天頂衛星を用いた測位技術
| 測位技術 | 測位方式 | コスト | 基準局 | 測位技術概要 | 測位精度 |
|---|---|---|---|---|---|
| キャリアフェーズ +PPP |
多周波マルチGNSS RTK+L6(PPP) | ◎ | 不要 | 複数の測位衛星システムの複数の周波数の信号の搬送波をカウント+L6の補正情報を利用。距離に換算し測位。 | RTK:1cm~10cm程度 PPP:10cm |
